# Excavator
# Introduction
An Excavator is a heavy construction equipment used Primarily for digging, lifting and carrying tasks in various applications. Let’s build an excavator robot using KiMu’s Advanced Automate kit, which utilizes stepper motors to control the excavator arms by a fixed amount of degrees.
# Key skills/Learnings
- Assembly of Components
- Problem Solving
- Logical Thinking
- Mechanics & Motion
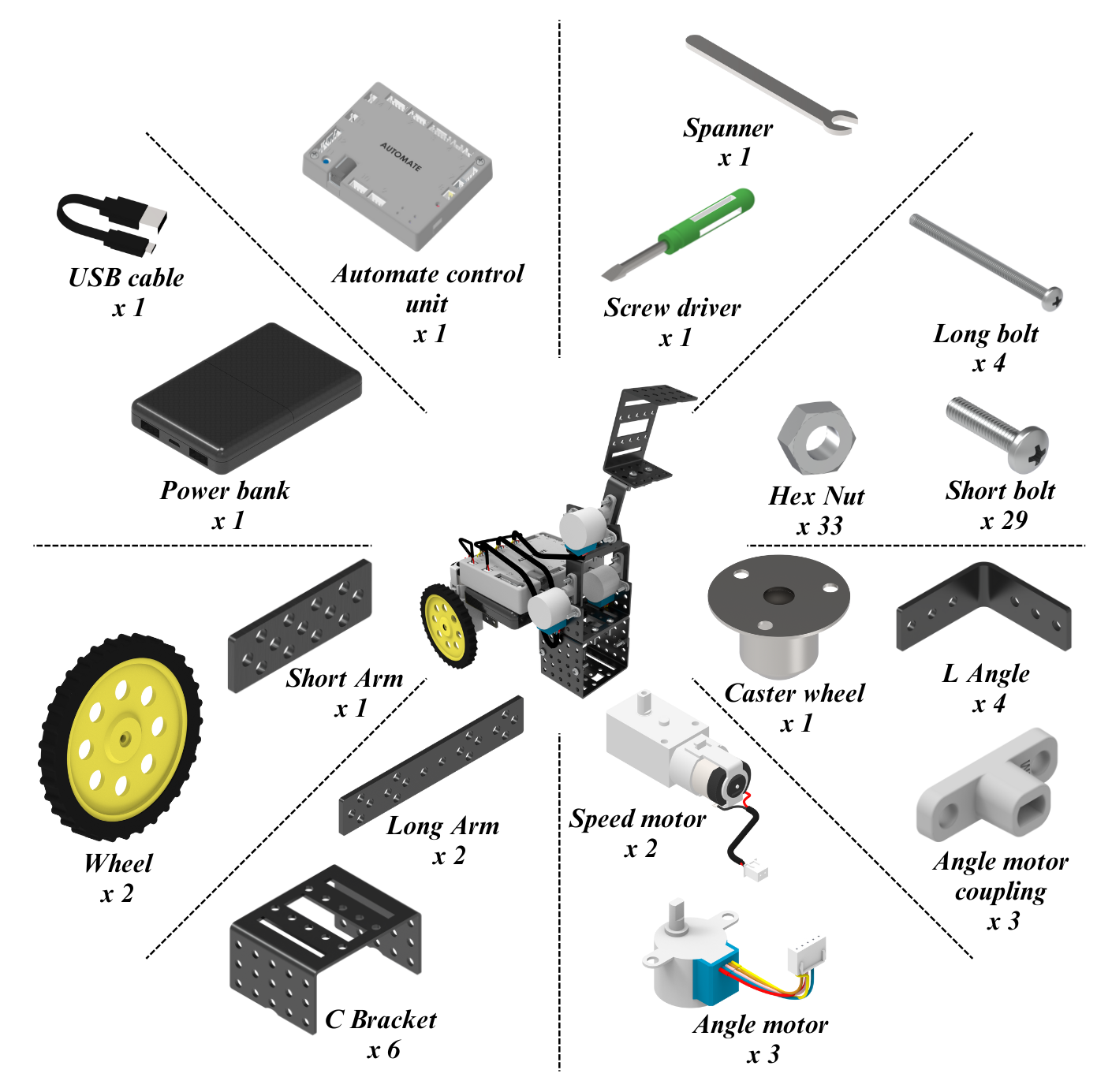
# List of Items
# Assemble the Remote-Control Car
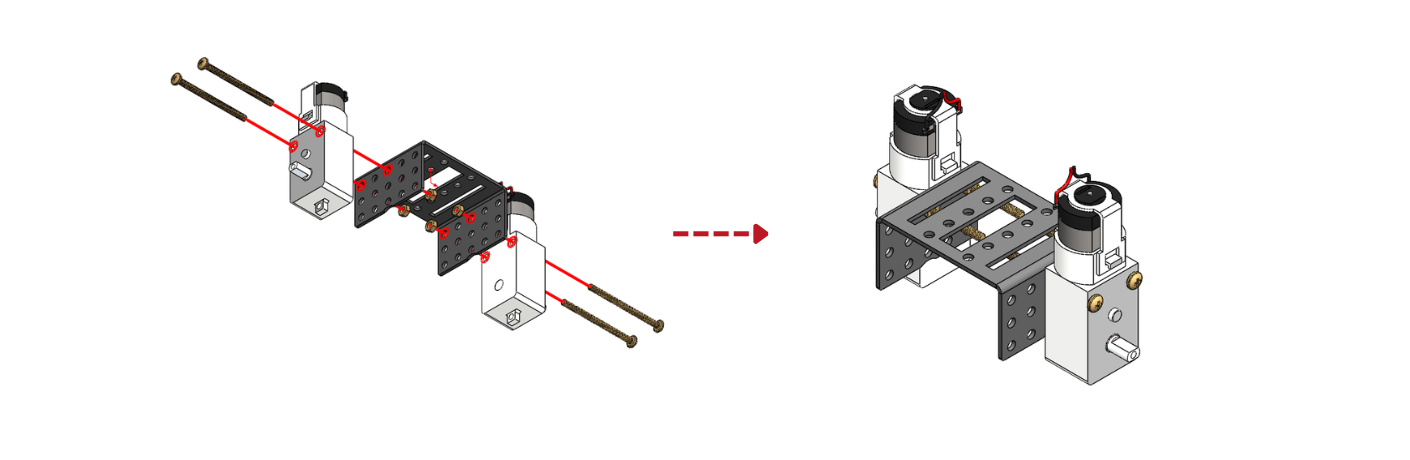
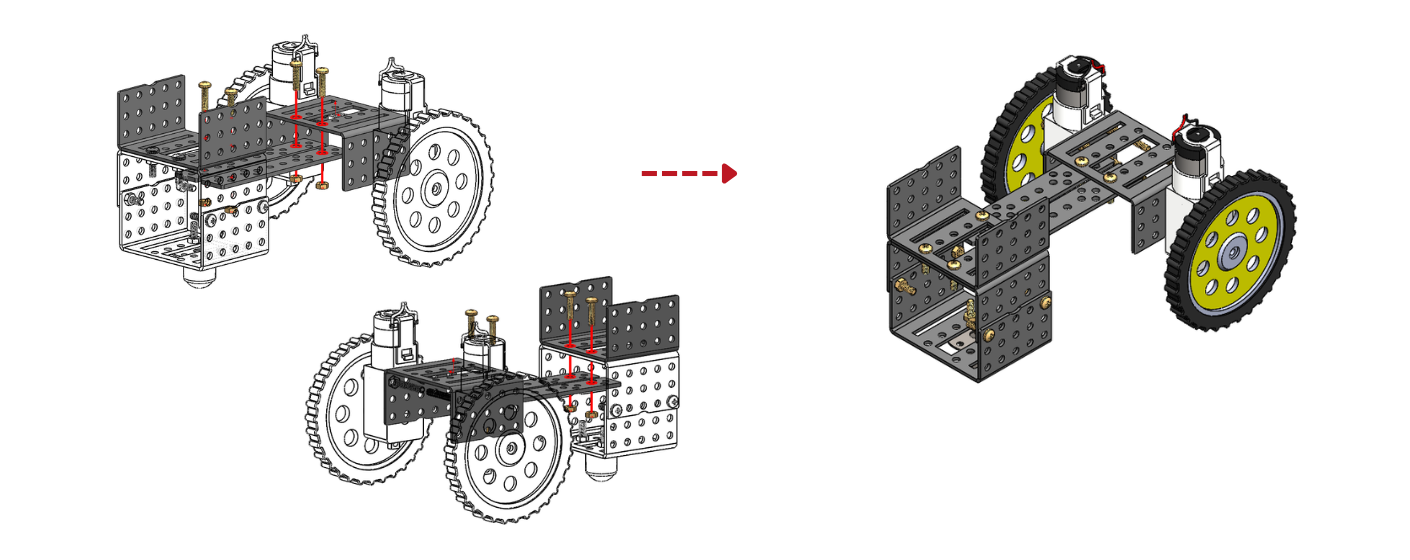
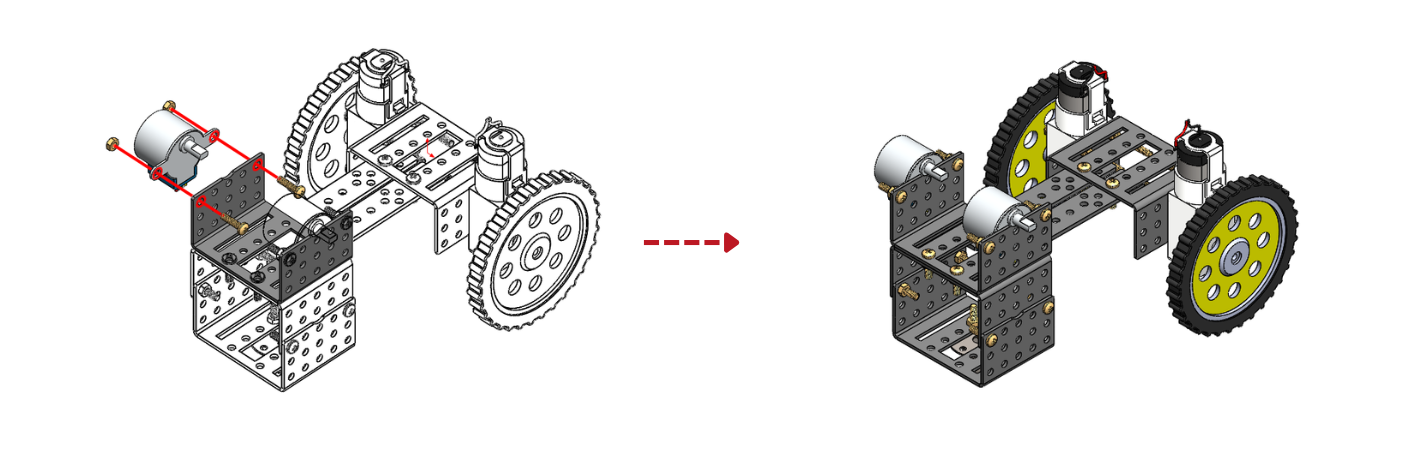
Step 1: Assemble the speed motors to C-Bracket using long bolts and nuts.
Step 2: Assemble the wheels to each speed motor.
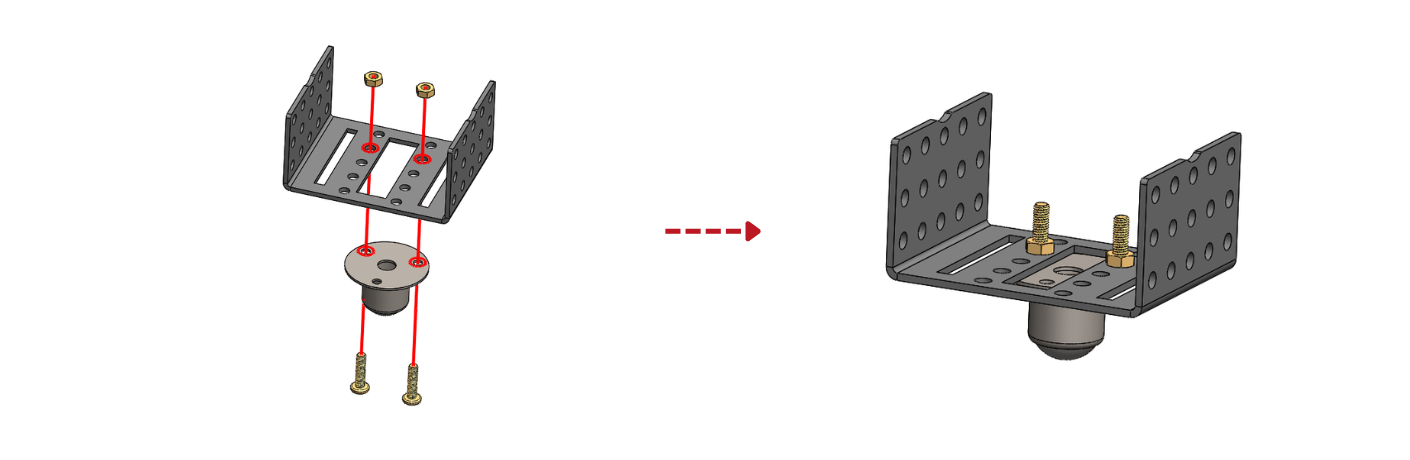
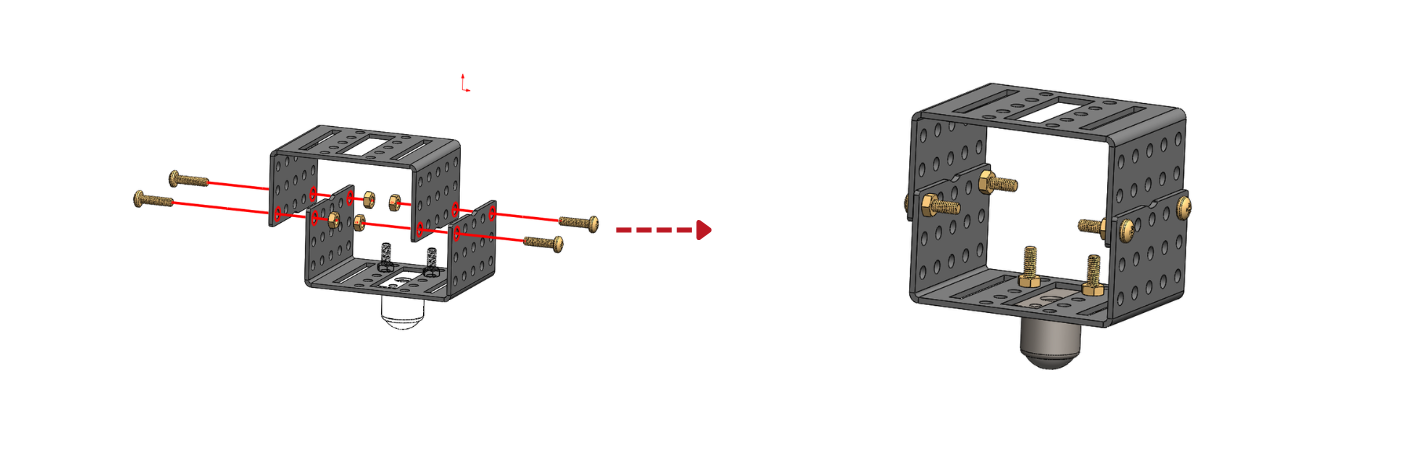
 Step 3: Assemble the Caster wheel to the C-bracket using short bolts and nuts.
Step 3: Assemble the Caster wheel to the C-bracket using short bolts and nuts.
 Step 4: Assemble the C-Bracket to the sub- assembly done in step 3 using the short bolts and nuts.
Step 4: Assemble the C-Bracket to the sub- assembly done in step 3 using the short bolts and nuts.
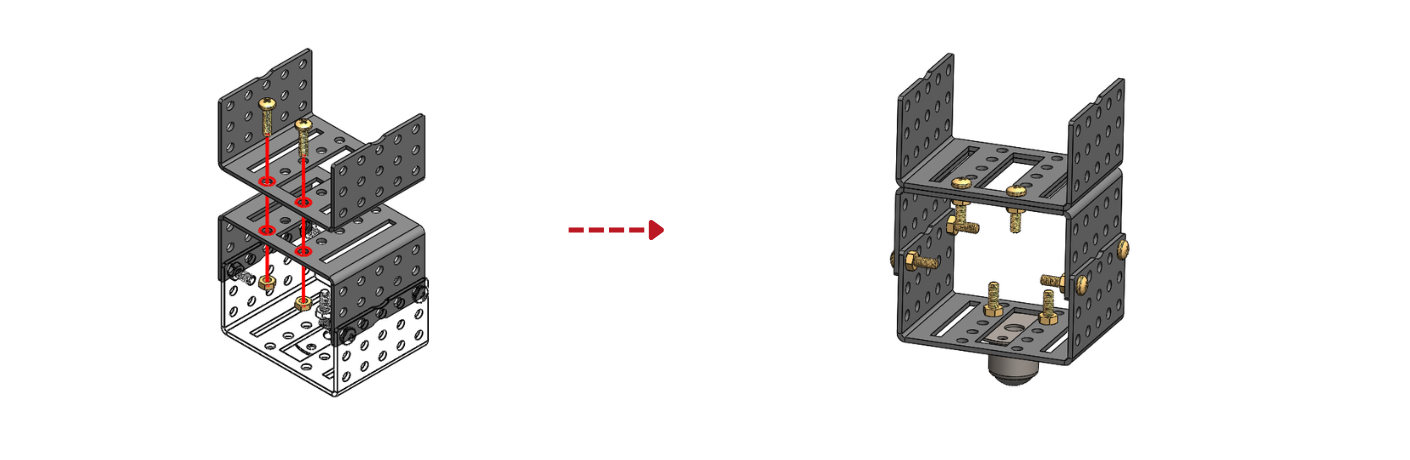
Step 5: Assemble a C-Bracket to the sub-assembly done in step 4 using bolts and nuts.
Step 6: Connect the sub-assemblies in step 2 and step 5 with two long arms using short bolts and nuts.
Step 7: Assemble the Angle motor to the sub-assembly done in step 6 using short bolts and nuts.
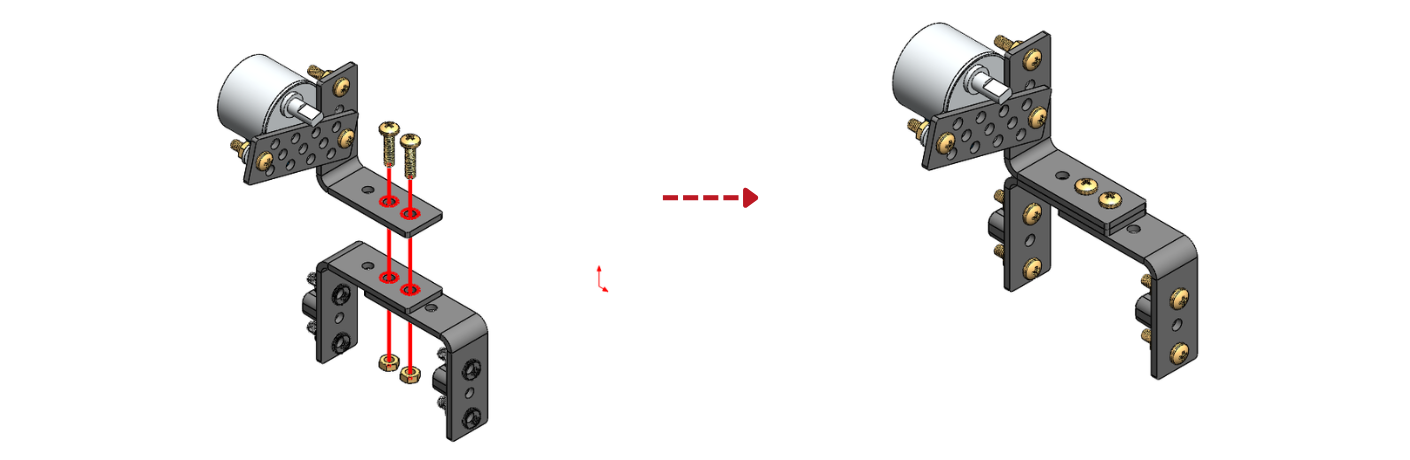
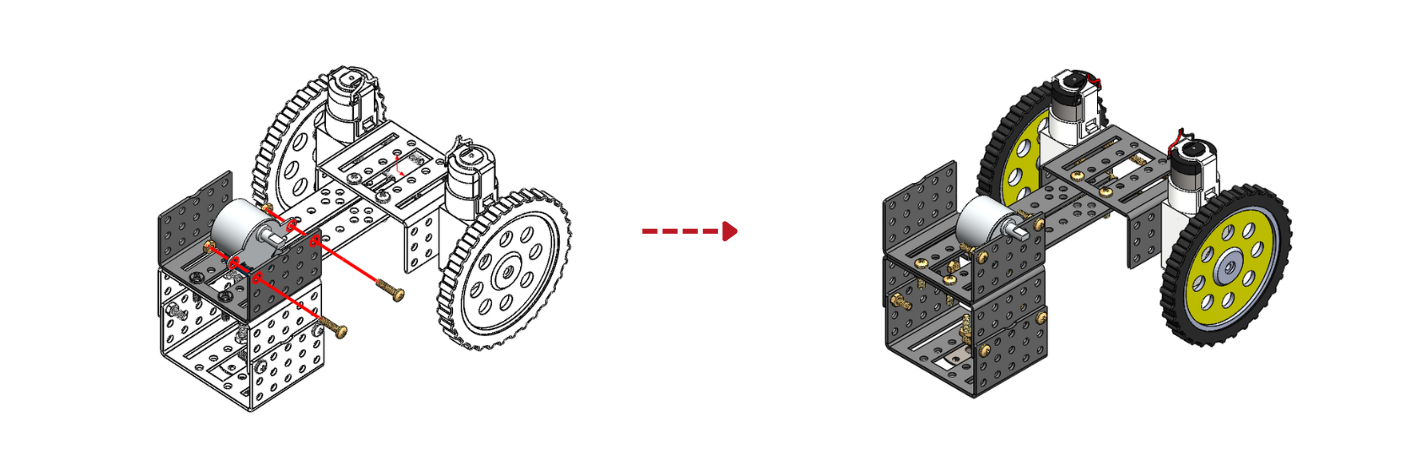 Step 8: Assemble the Angle motor to the sub-assembly done in step 7 using short bolts and nuts.
Step 8: Assemble the Angle motor to the sub-assembly done in step 7 using short bolts and nuts.
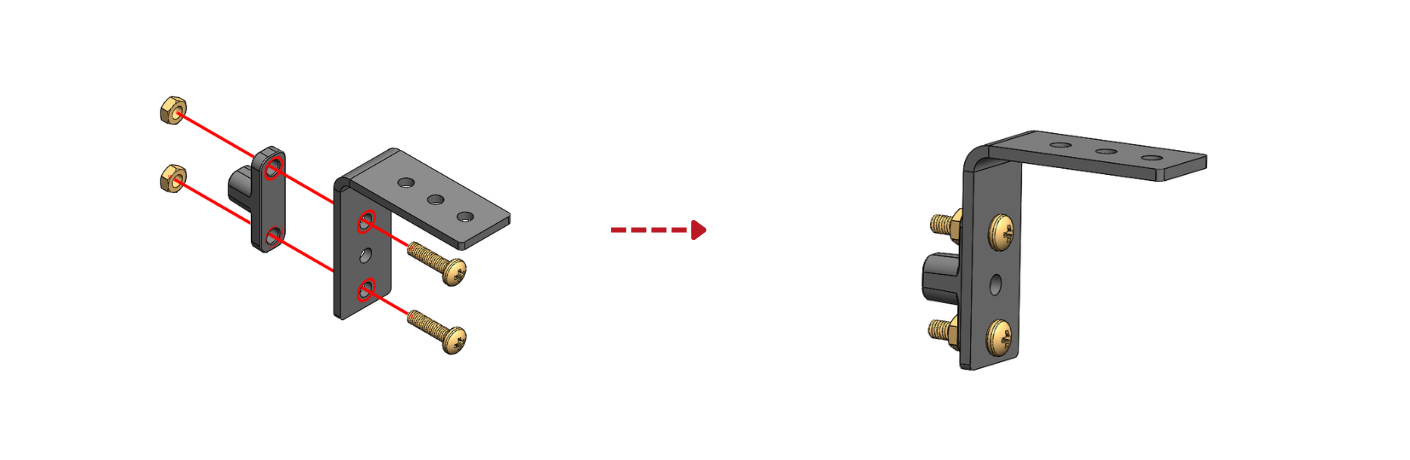
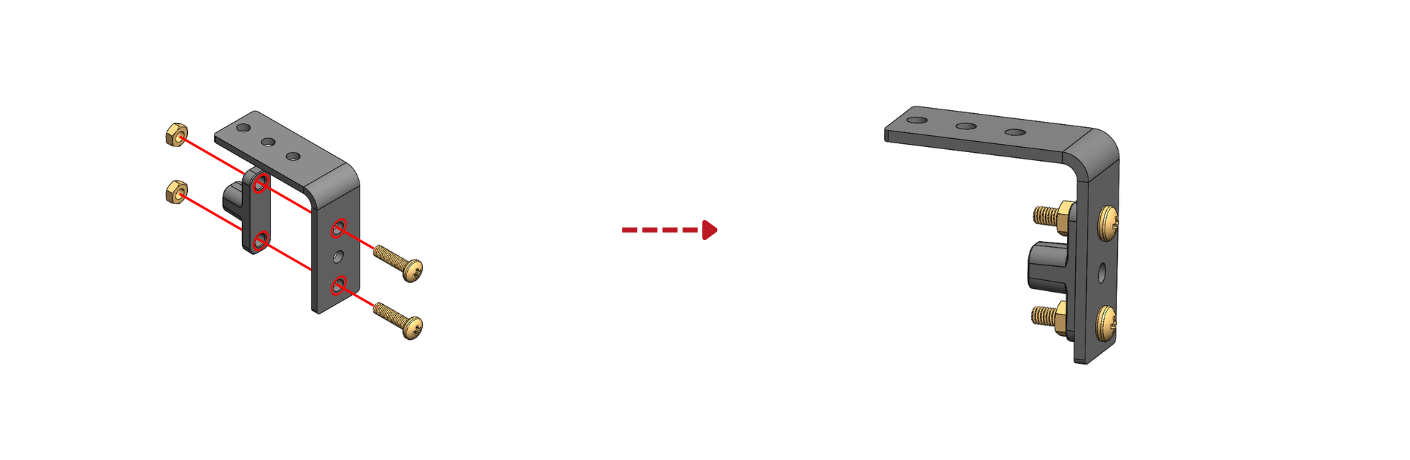
 Step 9: Assemble the L angle to the Angle motor coupling using short bolts and nuts.
Step 9: Assemble the L angle to the Angle motor coupling using short bolts and nuts.
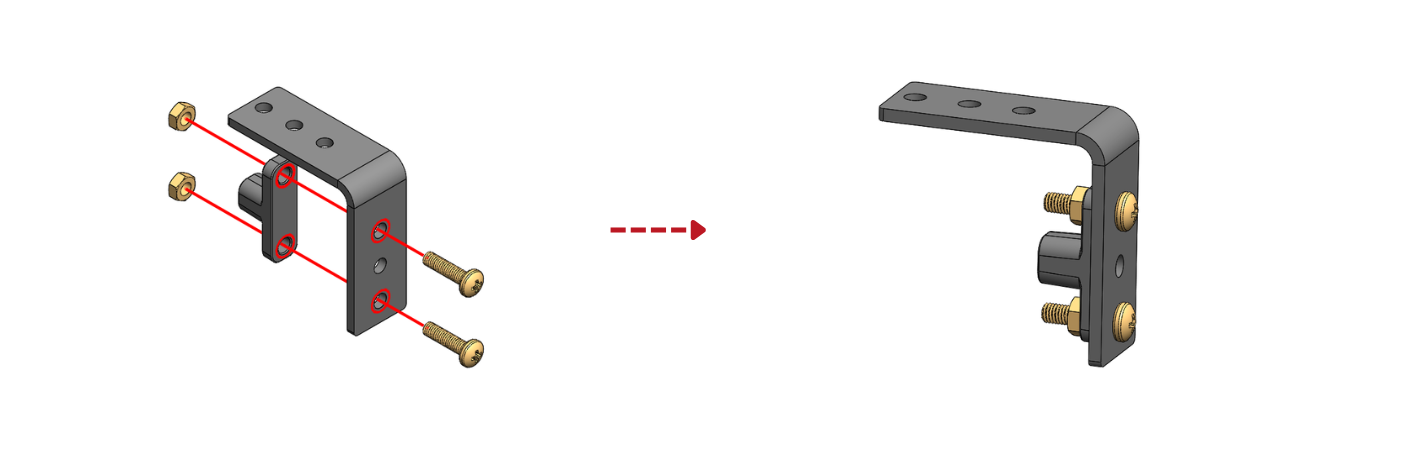
 Step 10: Assemble the L angle to the Angle motor coupling using short bolts and nuts.
Step 10: Assemble the L angle to the Angle motor coupling using short bolts and nuts.
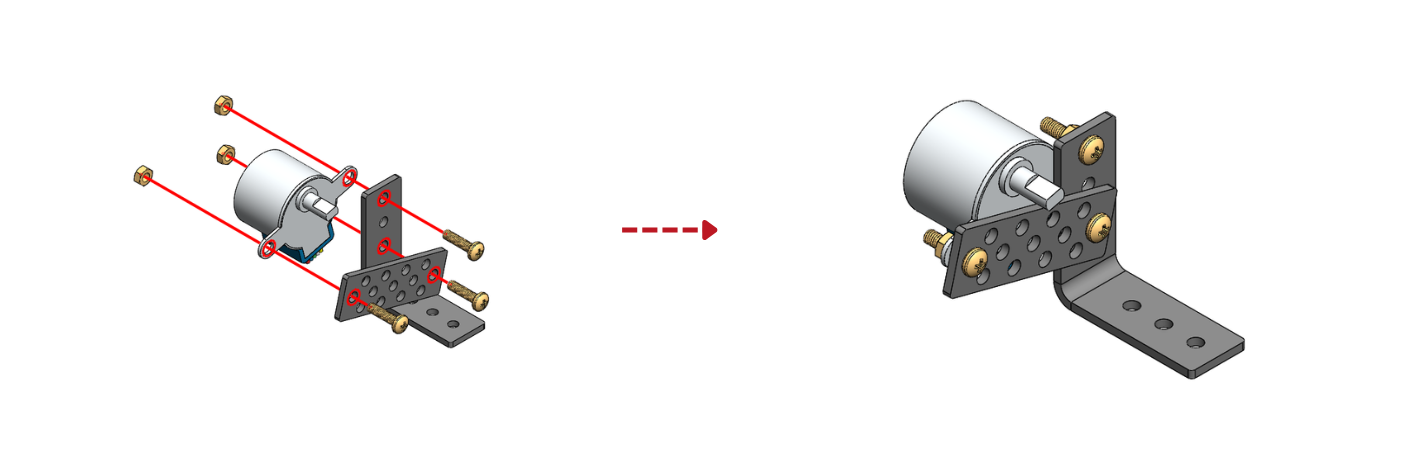
Step 11: Assemble a Angle motor to L angle and short arm using short bolts.
 Step 12: Assemble the sub-assemblies from step 9, step 10 and step 11 using short bolts and nuts [Arm-1].
Step 12: Assemble the sub-assemblies from step 9, step 10 and step 11 using short bolts and nuts [Arm-1].
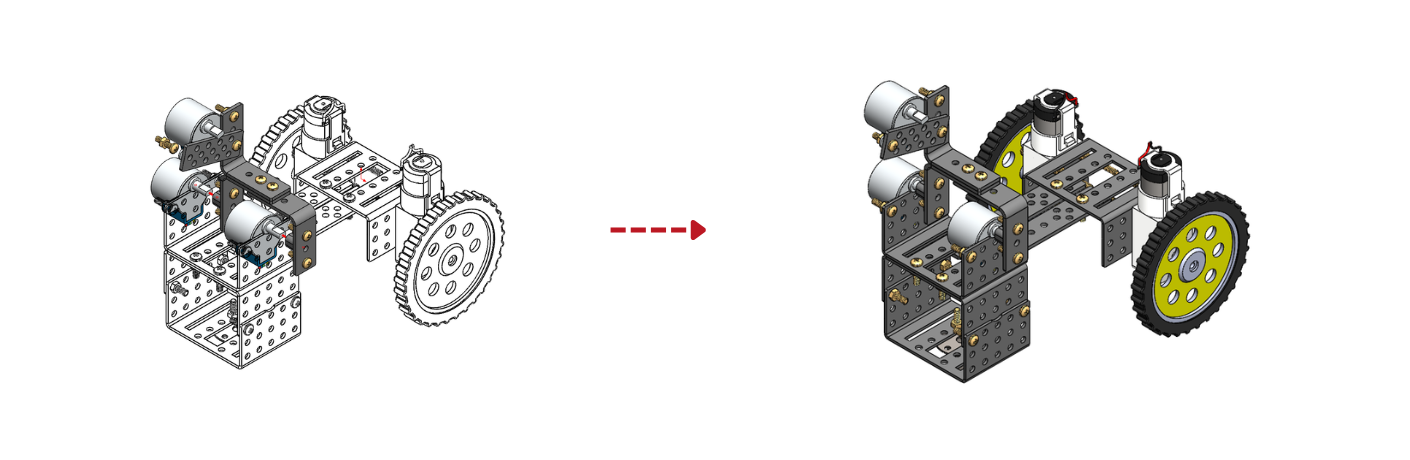
Step 13: Connect the sub assembly in step 12 to the sub assembly in step 8.
 Step 14: Assemble the L angle to the Angle motor coupling using short bolts and nuts.
Step 14: Assemble the L angle to the Angle motor coupling using short bolts and nuts.
 Step 15: Connect the C-bracket to the sub assembly in step 14 using short bolts and nuts.[Arm-2]
Step 15: Connect the C-bracket to the sub assembly in step 14 using short bolts and nuts.[Arm-2]
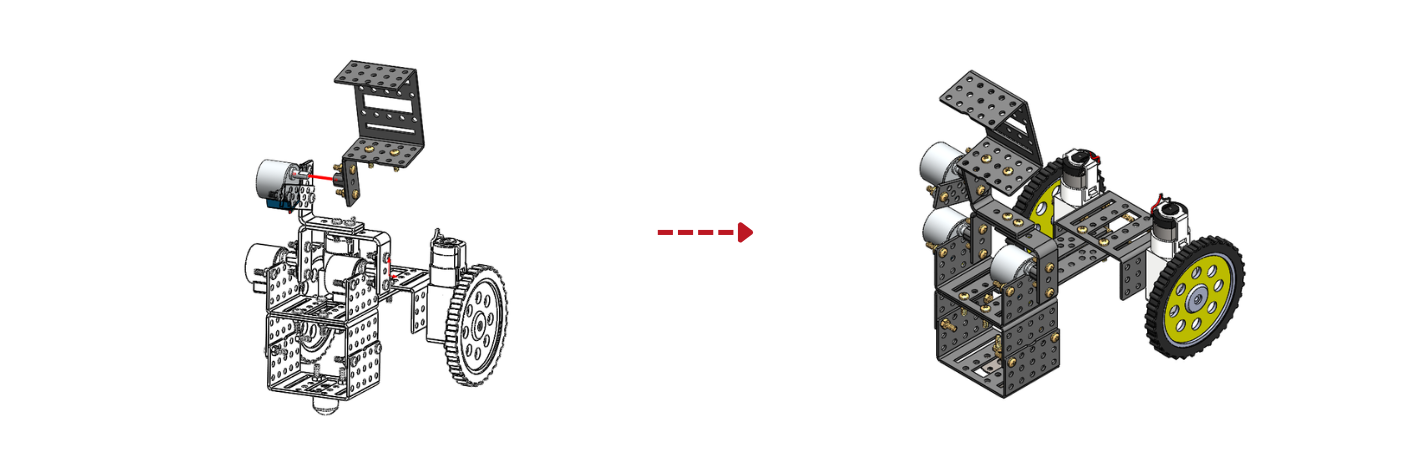
 Step 16: Attach the sub-assembly done in step 15 and to the assembly done in step 13 with matching orientation to the angle motor.
Step 16: Attach the sub-assembly done in step 15 and to the assembly done in step 13 with matching orientation to the angle motor.
Step 17: Use Double side tape to stick the controller, power bank and the above assembly together.
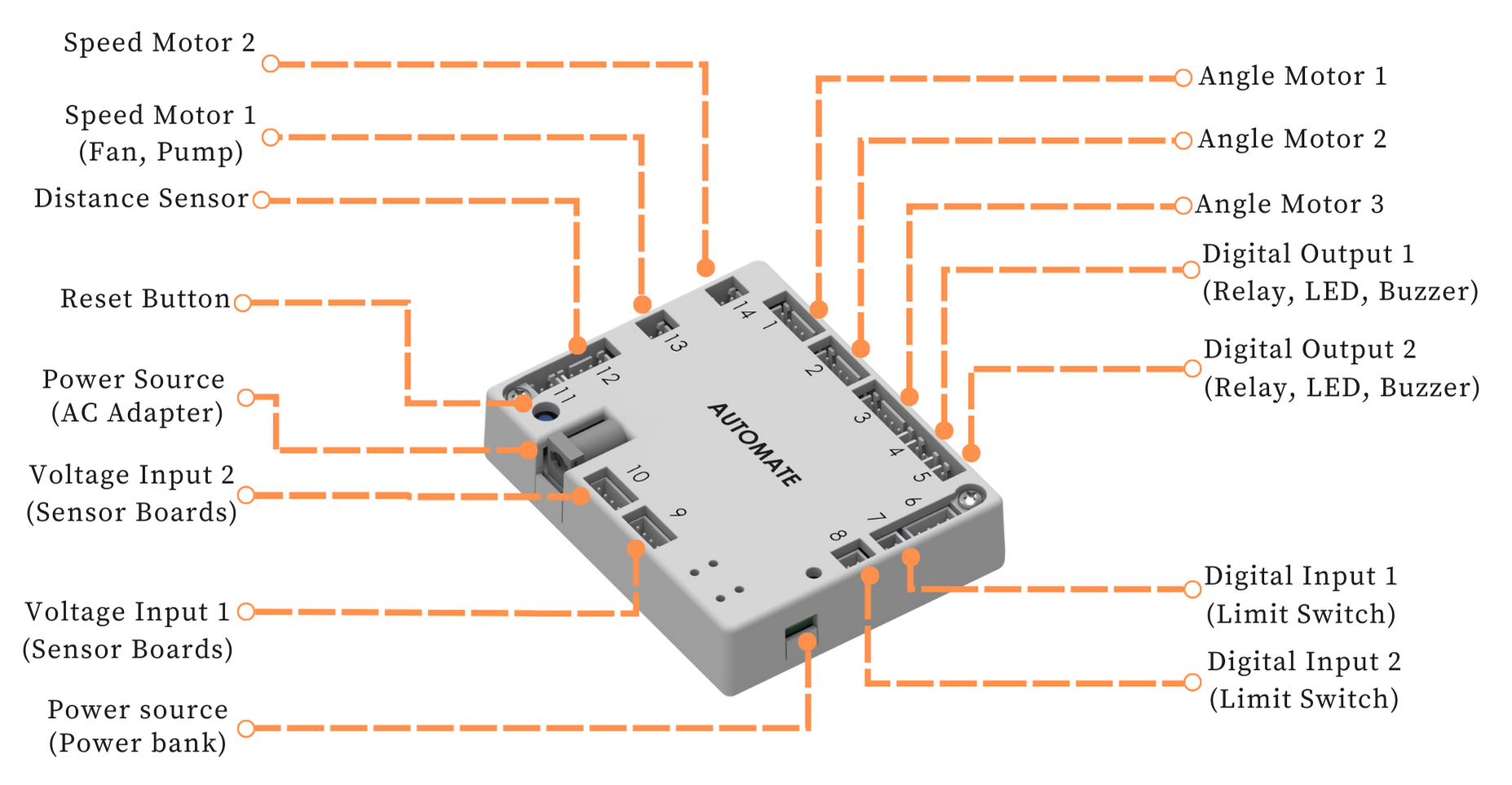
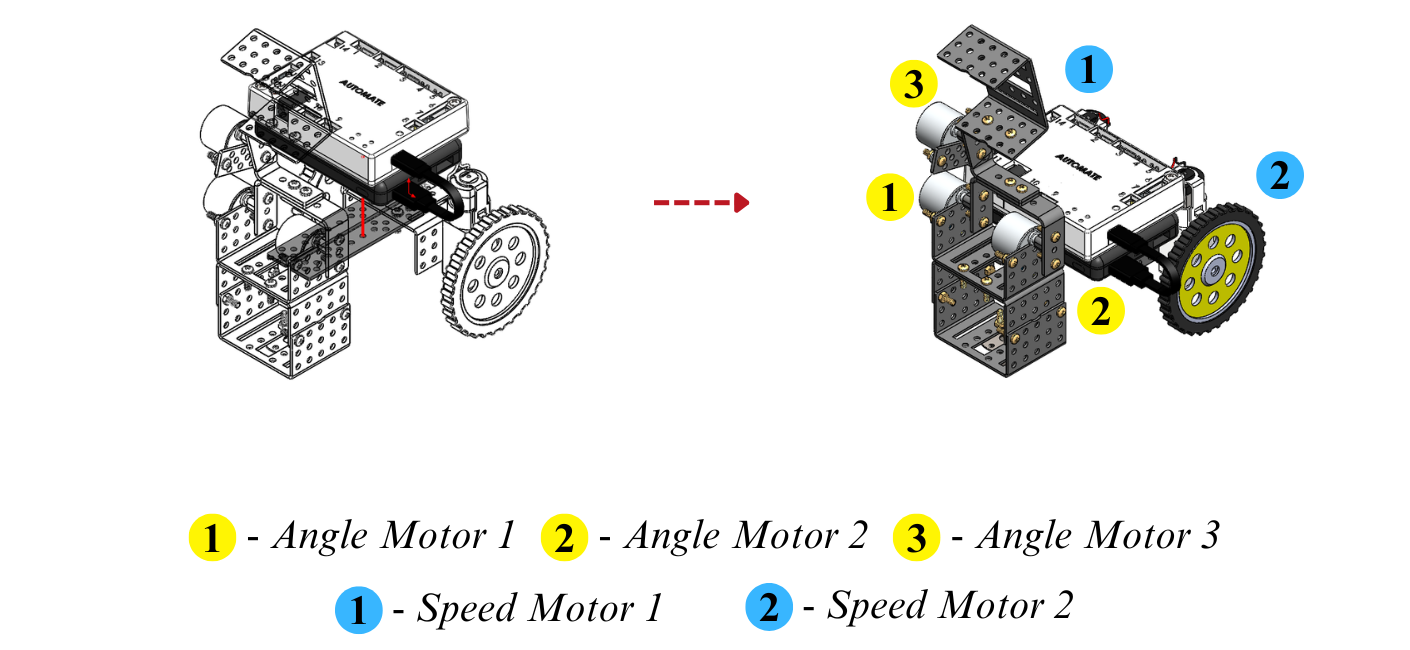 Step 18: For the connections of Speed motors, Angle Motors, and power refer to below image.
Step 18: For the connections of Speed motors, Angle Motors, and power refer to below image.
# Programming with Automate App
# Configuring the app - Remote controls setup
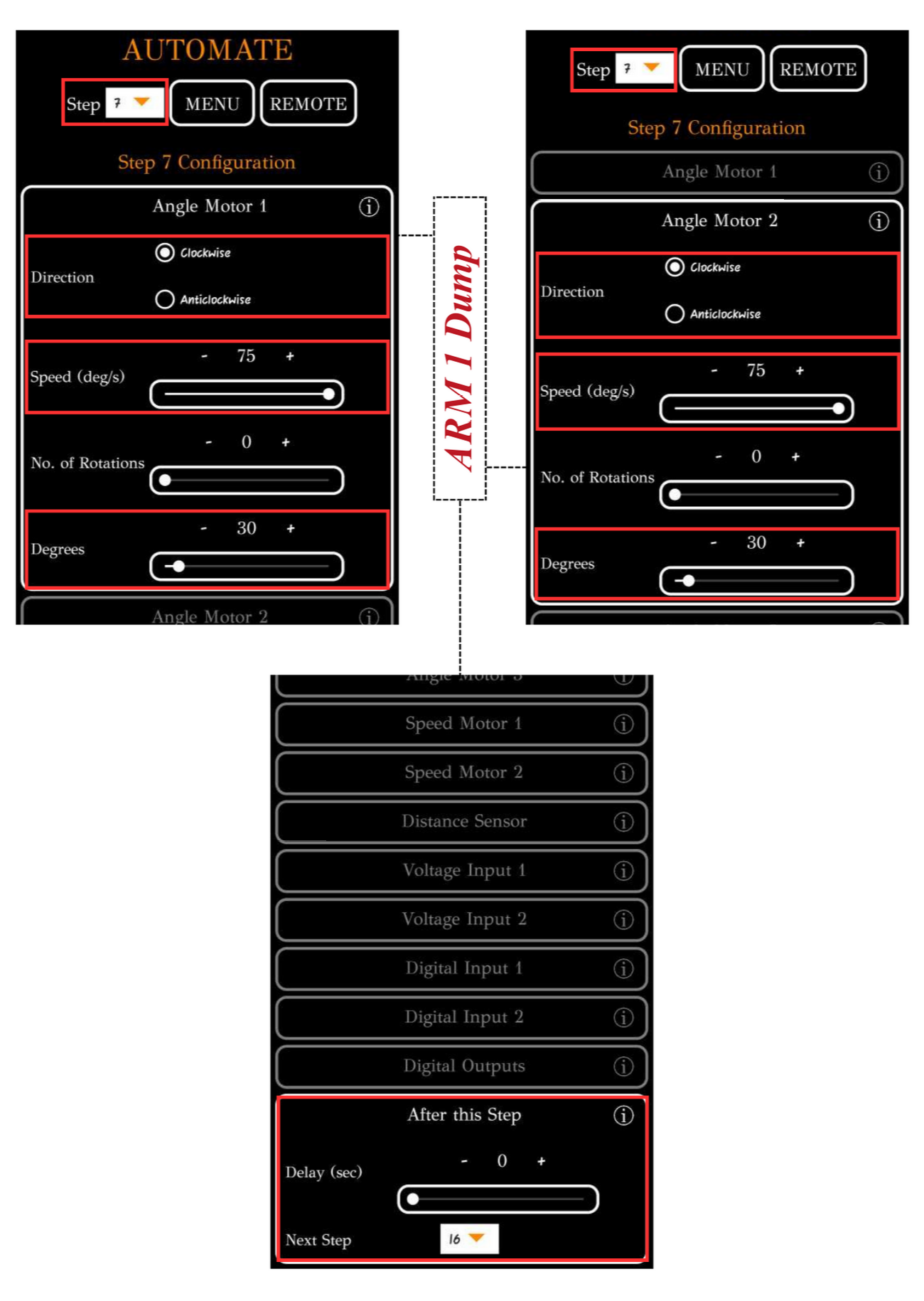
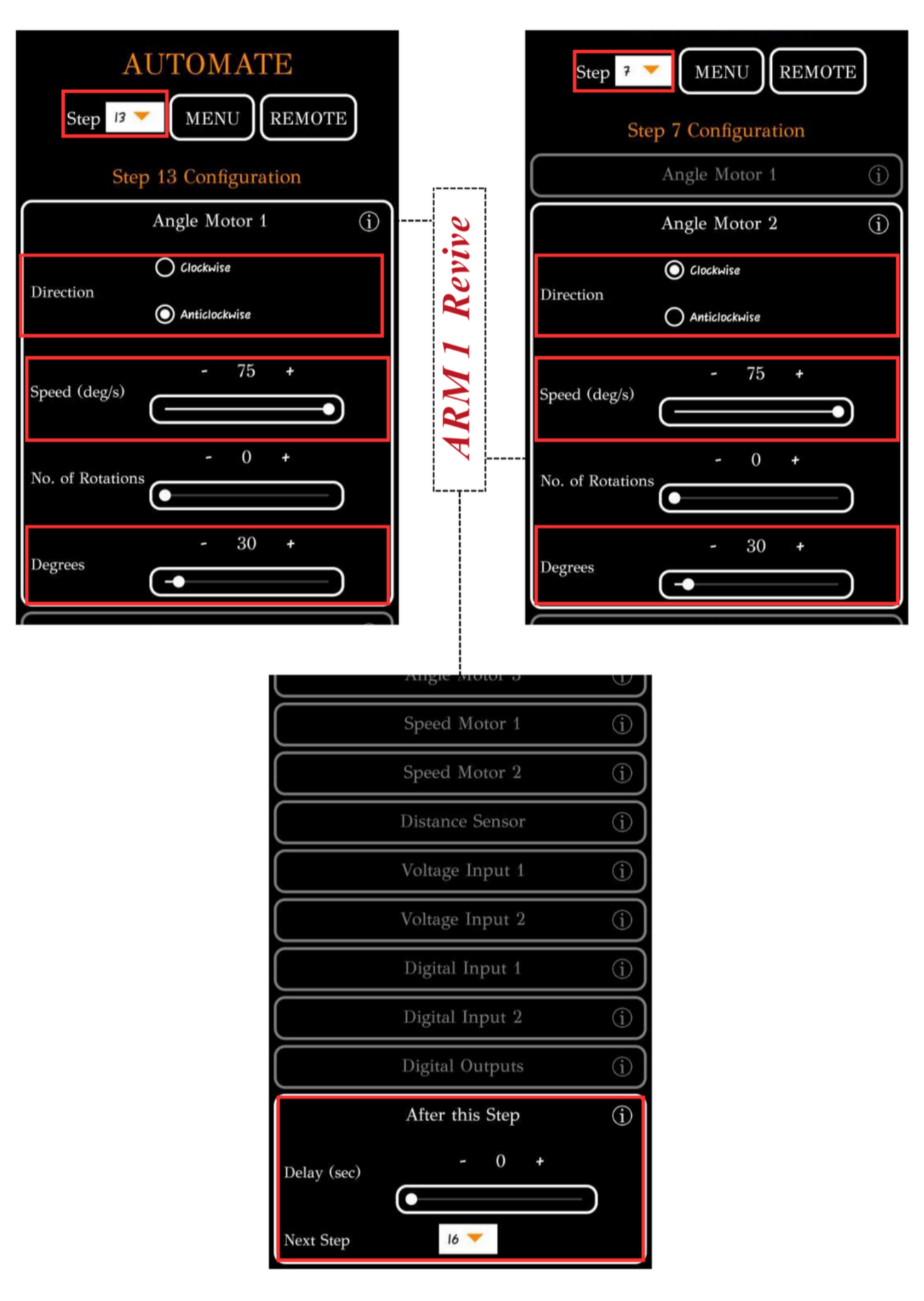
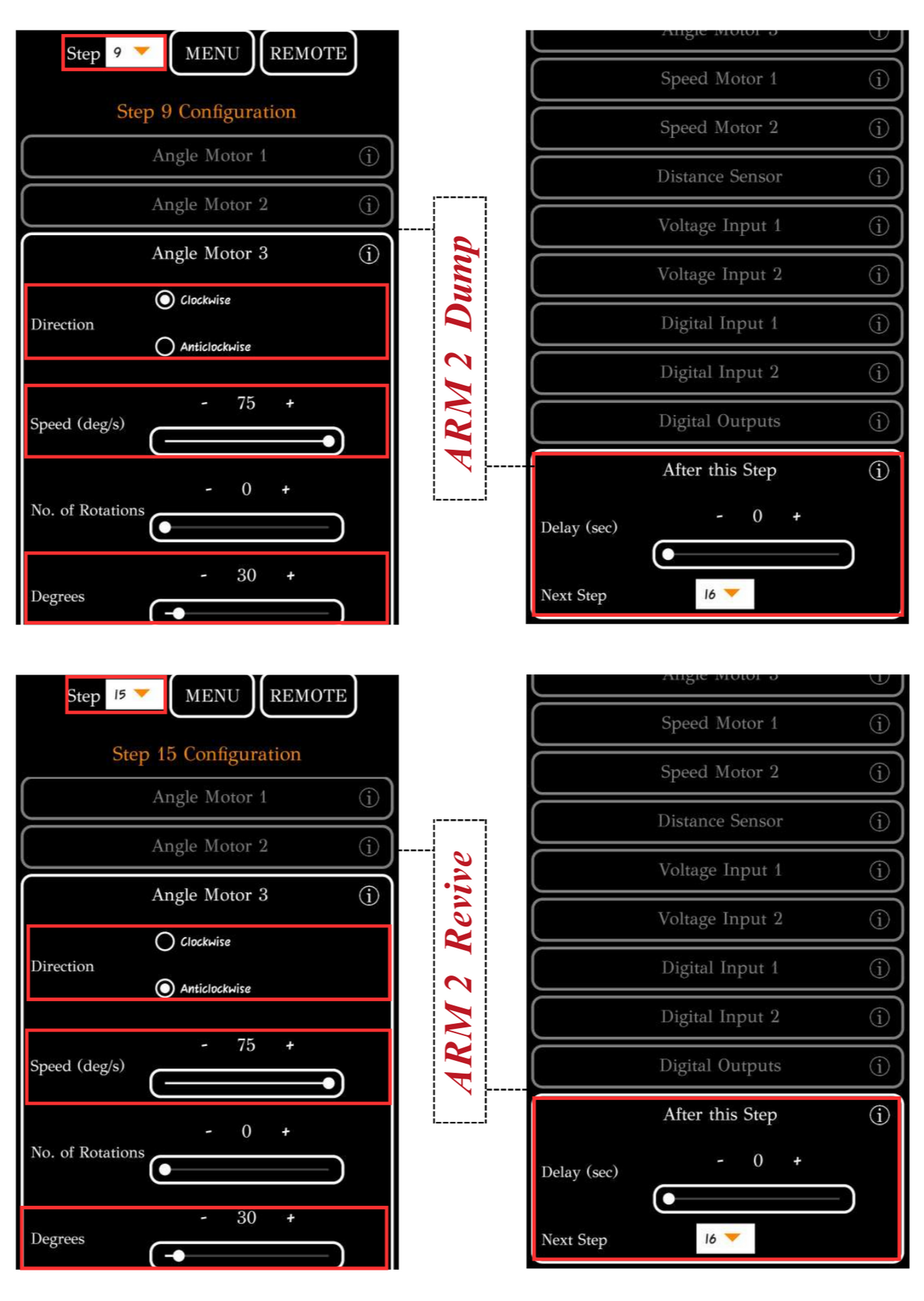
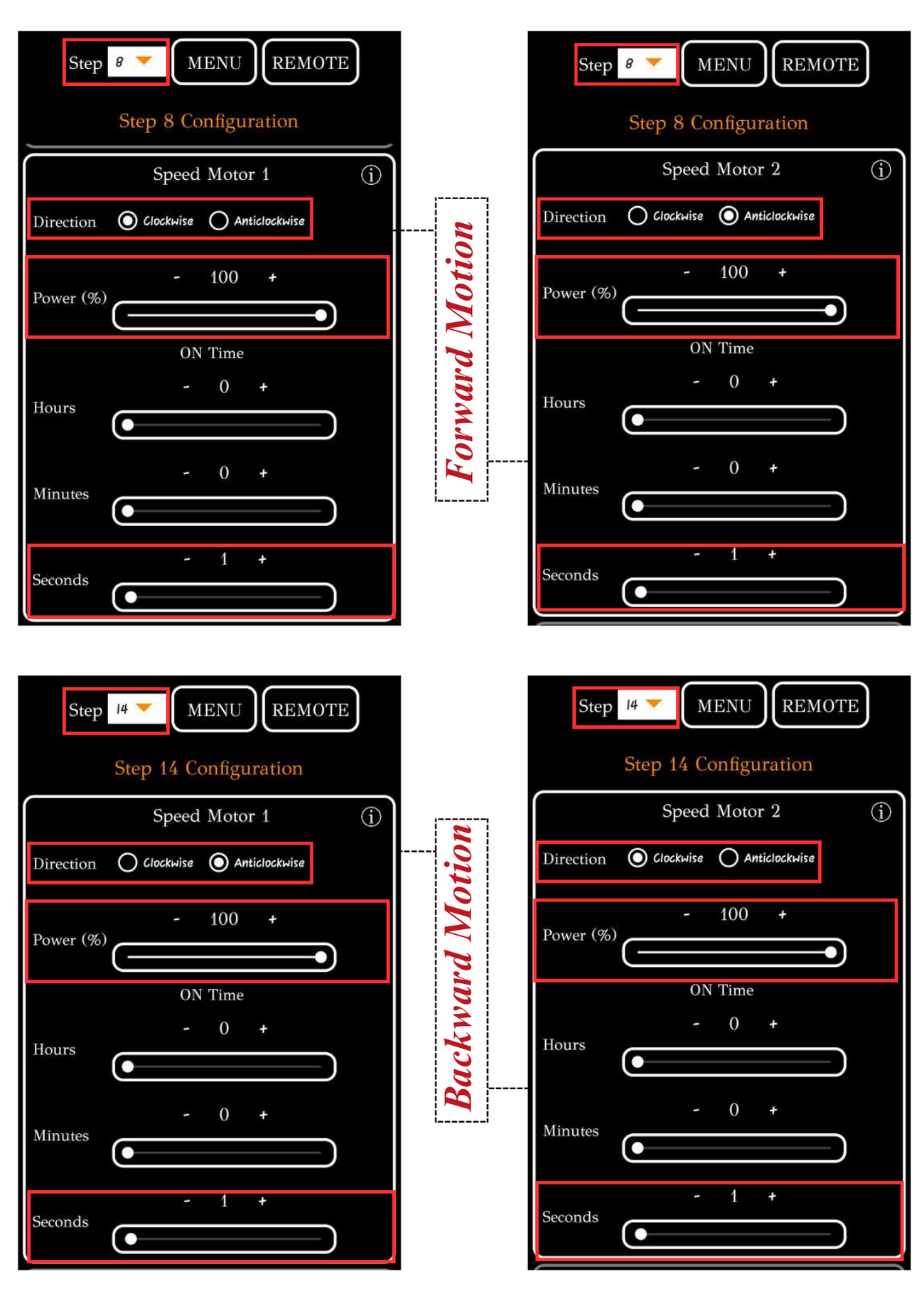
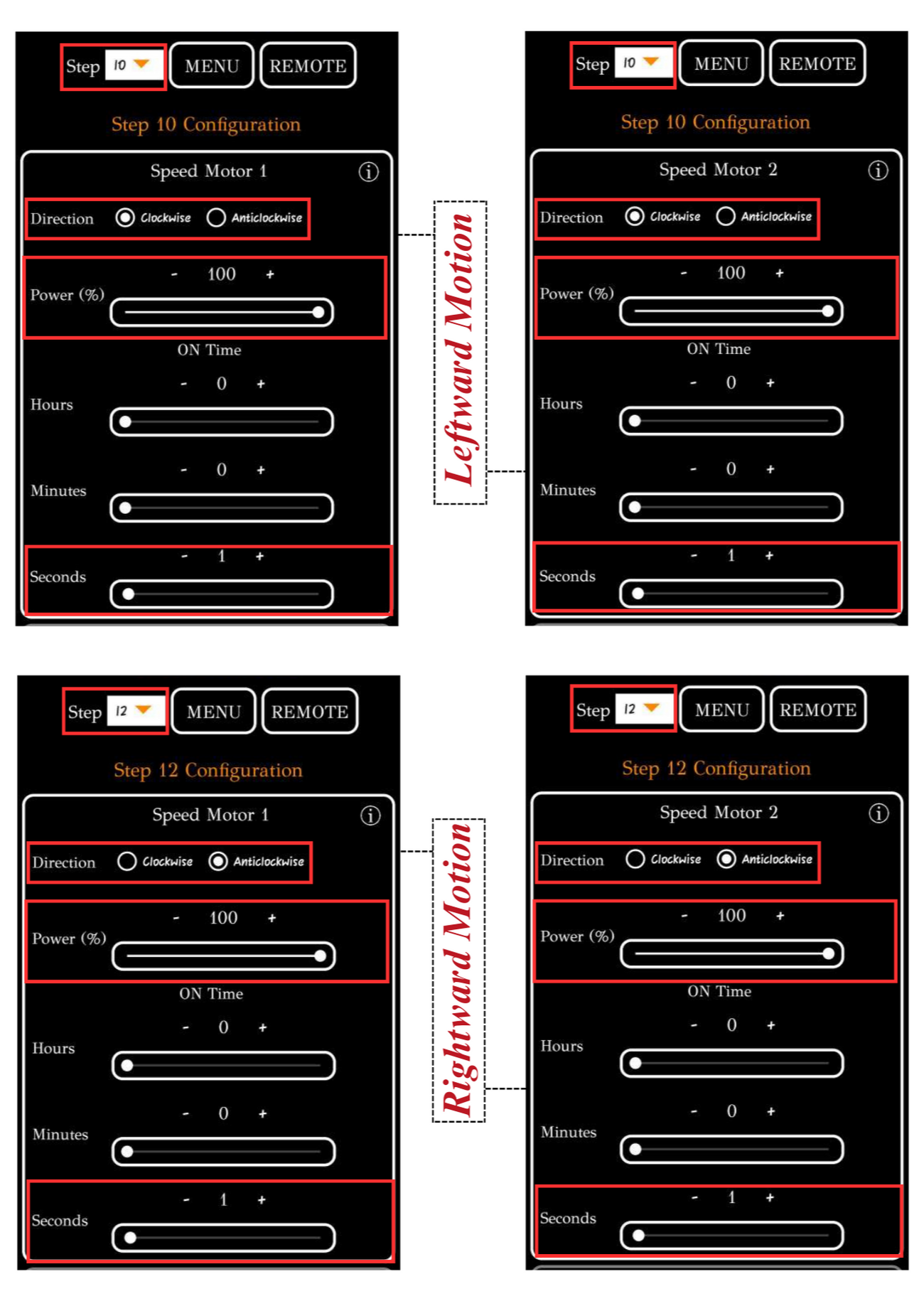
STEP Buttons are configured as shown in the image below to represent the arrows used in the game. These configurations can be altered by the user according to their needs or requirements.
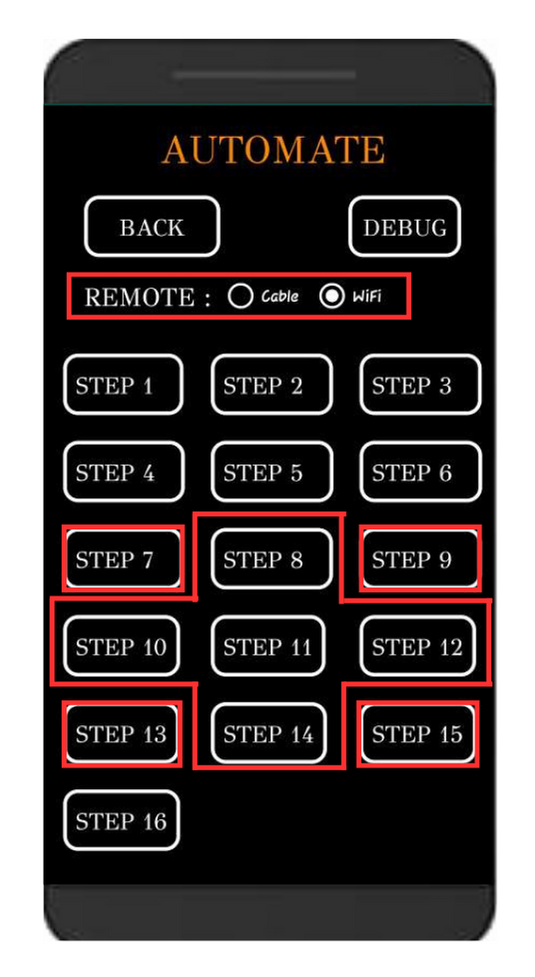
STEP 7 - Arm 1 Dump
STEP 13 - Arm 1 Revive
STEP 9 - Arm 2 Dump
STEP 15 - Arm 2 Revive
STEP 8 - Forward motion
STEP 14 - Backward motion
STEP 10 - Leftward motion
STEP 12 - Rightward motion
TO "STOP" THE EXCAVATOR CLICK ON ANY BUTTON OTHER THAN THE ABOVE CONFIGURED BUTTONS.
Note: Automate can be controlled using a cable by selecting the cable option instead of Wi-Fi under the remote option.
To upload the program, see How to upload the program to the Control Unit with Automate App?
Excavator is ready to dig after uploading this program.
# More Information
For more details, see FAQs on Automate Kit.